Image Classification using Convolutional Neural Networks in PyTorch
Part 5 of "Deep Learning with Pytorch: Zero to GANs"
This tutorial series is a hands-on beginner-friendly introduction to deep learning using PyTorch, an open-source neural networks library. These tutorials take a practical and coding-focused approach. The best way to learn the material is to execute the code and experiment with it yourself. Check out the full series here:
- PyTorch Basics: Tensors & Gradients
- Gradient Descent & Linear Regression
- Working with Images & Logistic Regression
- Training Deep Neural Networks on a GPU
- Image Classification using Convolutional Neural Networks
- Data Augmentation, Regularization and ResNets
- Generating Images using Generative Adversarial Networks
This tutorial covers the following topics:
- Downloading an image dataset from web URL
- Understanding convolution and pooling layers
- Creating a convolutional neural network (CNN) using PyTorch
- Training a CNN from scratch and monitoring performance
- Underfitting, overfitting and how to overcome them
How to run the code
This tutorial is an executable Jupyter notebook hosted on Jovian. You can run this tutorial and experiment with the code examples in a couple of ways: using free online resources (recommended) or on your computer.
Option 1: Running using free online resources (1-click, recommended)
The easiest way to start executing the code is to click the Run button at the top of this page and select Run on Colab. Google Colab is a free online platform for running Jupyter notebooks using Google's cloud infrastructure. You can also select "Run on Binder" or "Run on Kaggle" if you face issues running the notebook on Google Colab.
Option 2: Running on your computer locally
To run the code on your computer locally, you'll need to set up Python, download the notebook and install the required libraries. We recommend using the Conda distribution of Python. Click the Run button at the top of this page, select the Run Locally option, and follow the instructions.
Using a GPU for faster training
You can use a Graphics Processing Unit (GPU) to train your models faster if your execution platform is connected to a GPU manufactured by NVIDIA. Follow these instructions to use a GPU on the platform of your choice:
- Google Colab: Use the menu option "Runtime > Change Runtime Type" and select "GPU" from the "Hardware Accelerator" dropdown.
- Kaggle: In the "Settings" section of the sidebar, select "GPU" from the "Accelerator" dropdown. Use the button on the top-right to open the sidebar.
- Binder: Notebooks running on Binder cannot use a GPU, as the machines powering Binder aren't connected to any GPUs.
- Linux: If your laptop/desktop has an NVIDIA GPU (graphics card), make sure you have installed the NVIDIA CUDA drivers.
- Windows: If your laptop/desktop has an NVIDIA GPU (graphics card), make sure you have installed the NVIDIA CUDA drivers.
- macOS: macOS is not compatible with NVIDIA GPUs
If you do not have access to a GPU or aren't sure what it is, don't worry, you can execute all the code in this tutorial just fine without a GPU.
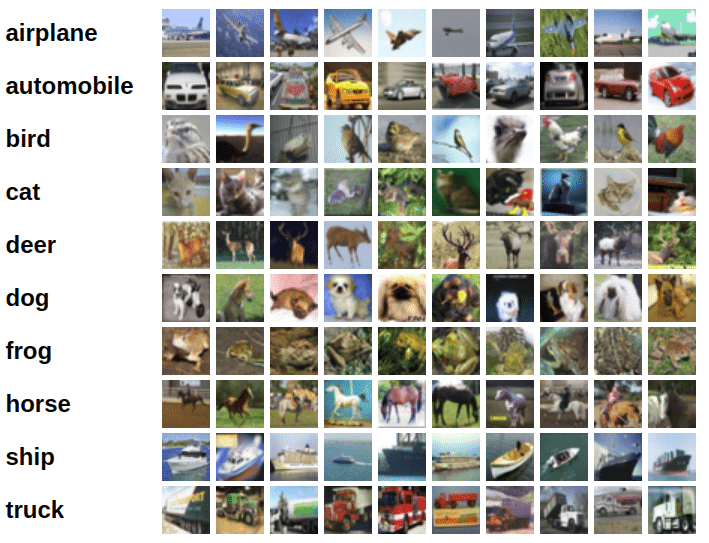
Exploring the CIFAR10 Dataset
In the previous tutorial, we trained a feedfoward neural networks with a single hidden layer to classify handwritten digits from the MNIST dataset with over 97% accuracy. For this tutorial, we'll use the CIFAR10 dataset, which consists of 60000 32x32 px colour images in 10 classes. Here are some sample images from the dataset: